![]()
![]()
2014-12-31 11:44:38 k73游戏之家 作者:themostunusual
太空工程师这款游戏中转子是非常重要的,玩家们可以充分发挥自己的想象能力,下面小编给玩家们介绍的是关于太空工程师双M型反相转子组对的自行走机械装置一览。
自从有了转子以来,我就一直想要拥有一款能够自主行走的机械生物,于是第一个便想到的是机械狗,机械狗拥有四足,在行走的时候四肢是交替向前迈步的,但是如何做到让构造出来的机械狗能够自动交替迈步呢?
于是,我便想到了一个装置——双M型反相转子组对,原理如图
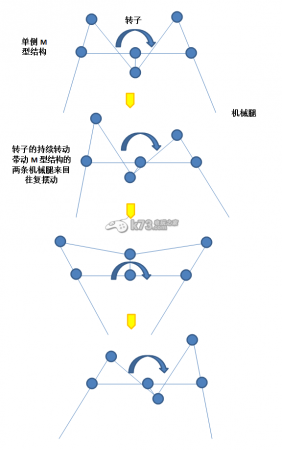
首先我们将四条腿的机械狗从中间切两半,只看其中一半的那两条腿的构造。中间的一个转子通过旋转带动M型机构做往复变形,最后导致M型机构左右两条外延腿形成交替前后摆动的运动趋势。再加上另一半,同时旋转的角度设置相差180度,形成两边反相,就能够使得四条腿能够依次轮流协作蹬踏了,如图

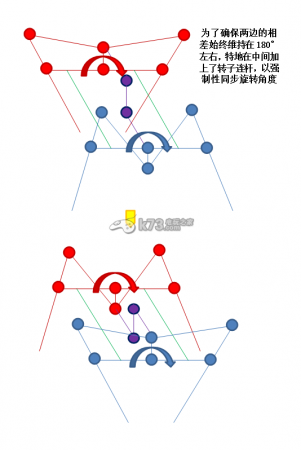
但是众所周知,转子很容易受到外力影响而导致转速不均,一开始两边能够相差180°,但是到后来积累误差就会越来越大,使得机械狗的四肢变得不协调,有点类似于人类的“同手同脚”现象,为了解决这个问题,就需要通过中间加一组转子连杆强制性地同步两边转子的转速,使得两边的相差始终维持在180°附近,这样,一旦两边的转子同时以同速率,并且一个顺时针,一个逆时针的方向旋转的话,就能够使得机械狗四肢交替运动。如图
但是,造出来之后,发现机械狗还是在做几乎原地的运动,原因是前后肢体一样长导致受力情况一样,所以讲M型加以改造成如下图
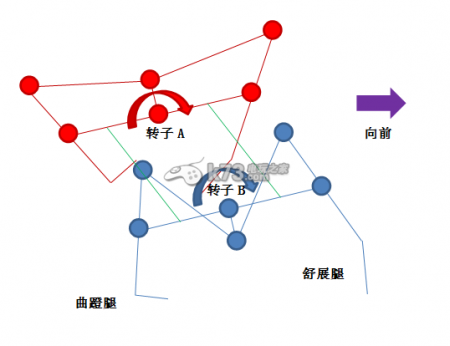
做成这样的前腿舒展后腿曲蹬的形状,就能够保证无论是A转子顺时针,B转子逆时针;还是A转子逆时针,B转子顺时针,机械狗都只会向舒展腿方向前行。
最后,为了加强它爬坡时的防打滑能力,在机械腿的末端稍向上加装了轮子,实验证明,装了轮子后,爬坡时更不容易打滑(无转子)
下面是测试视频,保管你一看就懂












